Stereo vision
two aligned cameras plus neural depth perception—to determine 3D depth and spatial structure. Proces depth through software algorithms rather than laser-based sensing.
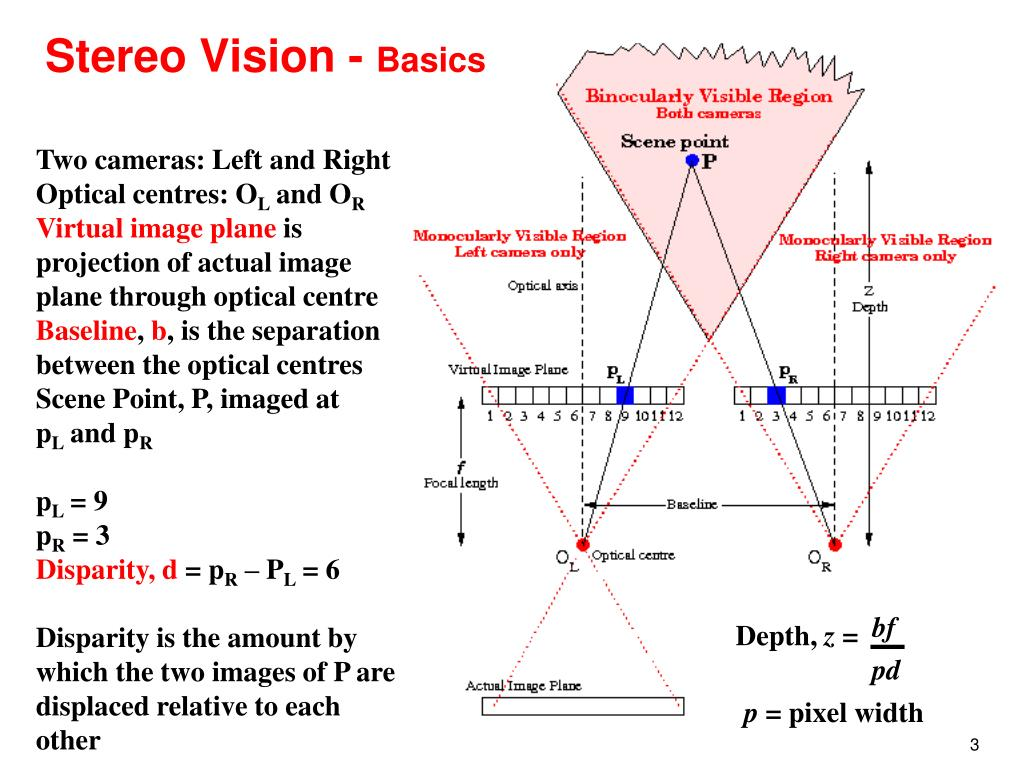
Stereo Vision Basics
Zed 2i
ZED 2i is an IP66-rated Rolling Shutter camera built for spatial analytics and immersive experiences, powered by Neural Depth Engine 2. Ready to deploy, it has a robust aluminum enclosure, high-performance IMU and USB 3.1 connection.
ALL the info on ZED camera's
Works on PC only
How to install: https://www.stereolabs.com/docs/installation/windows
Main Features
- Dual-Lens Stereo Vision: Provides advanced depth perception and 3D mapping capabilities.
- Spatial Understanding: Offers a detailed understanding of the surrounding environment.
- Motion Tracking: Tracks objects and people in real-time with high accuracy.
- High-Resolution Imaging: Captures high-quality images, essential for detailed visual work.
- Robust Build: Designed for a variety of environments, enhancing versatility.
- Integrated Sensors: Includes IMU, barometer, and magnetometer for comprehensive data collection.
- Flexible Connectivity: USB 3.1 connection for easy integration with various systems.
Here are the links to the TouchDesigner documentation regarding ZED TOP, CHOP and SOP:
TOP: https://docs.derivative.ca/ZED_TOP
CHOP: https://docs.derivative.ca/ZED_CHOP
SOP: https://docs.derivative.ca/ZED_SOP
Also, if this is a topic of your interest, it might come in handy to have a look at the official ZED documentation:
https://www.stereolabs.com/docs
more info on https://interactiveimmersive.io/blog/touchdesigner-integrations/updated-zed-camera-features-in-touchdesigner/
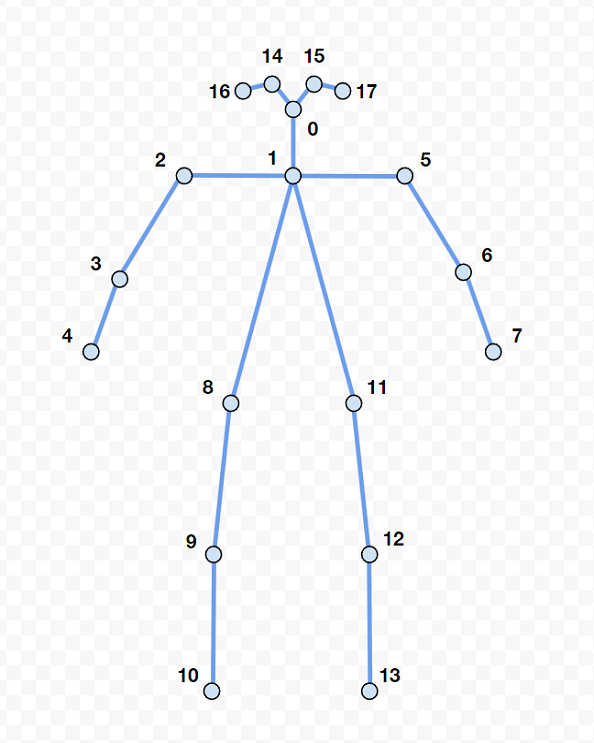
Skeleton tracking keypoints (there are various options)
OAK-D (Lite)
A small depth camera that combines stereo vision with an onboard AI processor.
The OAK-D can be used for 3D scanning because it produces RGB + depth maps that you can turn into a point cloud and mesh. You move the camera around an object or space, capture overlapping frames, and then stitch them together with software (e.g. Open3D, MeshLab, or ROS).
But: it’s not the preferred tool for 3D scanning.
-
Accuracy is lower than LiDAR or photogrammetry.
-
Shiny/transparent surfaces don’t scan well.
-
Range is limited (~10 m).
It’s great for real-time depth perception and robotics, but for high-quality 3D models you’d usually go with photogrammetry or LiDAR.
---------------------------------------------
-
How it works:
-
Two synchronized monochrome cameras capture slightly different views of the same scene.
-
Depth is computed by comparing the disparity (shift) between the two images.
-
An onboard neural depth engine accelerates the calculations, so the host computer doesn’t have to.
-
Optionally, an RGB camera provides color overlays on the depth map.
-
-
Key features:
-
Depth range: ~0.3 m – 10 m.
-
Field of view: ~70–80°.
-
USB-C powered, plug-and-play.
-
Runs AI models (object detection, face recognition, body pose estimation) directly on the device.
-
-
Why it matters for stereo vision:
-
Demonstrates that stereo vision can be compact, affordable, and real-time.
-
Doesn’t need external GPUs/CPUs for heavy lifting.
-
Provides a good bridge between basic stereo rigs (like DIY dual webcams) and advanced research hardware (like ZED cameras).
-
-
Use cases:
-
Robotics navigation.
-
Human pose tracking.
-
AR/VR prototyping.
-
Object recognition combined with depth.
-
Here's info on how to use it in Touchdesigner: https://derivative.ca/UserGuide/OAK-D
The example file is OAKExamples.toe. Instructions and tips are inside the file. The file is located in C:/Program Files/Derivative/TouchDesigner.2023.xxxxx/Samples/OAK.