3D depth camera's
In this book you can find different sources and tutorials concerning the use of 3D depth camera's like Kinect (360, v1 and v2), Azure, Intel RealSense and iPad Pro with lidar combined with creative software.
These devices include infrared depth sensing camera's, RGB color camera's & microphones. The SDK enables features such as skeleton tracking, hand interactions, point clouds and voice recognition. Each sensor has different specs.
- Types of Depth camera's & alternatives for position tracking
- Kinect on Mac
- Kinect on PC
- Mediapipe
- Oak D
- Zed 2i
- Various Plugins & tutorials
- Hokuyu URG-04LX-UG01
Types of Depth camera's & alternatives for position tracking
At HKU we have most of these camera's available. Inform about the possibilities at the Blackbox
|
|
|
|
|
|
Orbec Astra
|
zed 2i |
|
Oak D Lite |
|
|
|
|
|
|








Some comparison articles:
https://www.generationrobots.com/blog/en/luxonis-vs-realsense-which-depth-camera-should-i-choose/
https://docs.ipisoft.com/Depth_Sensors_Comparison
the 3 kinects compared: https://www.mdpi.com/1424-8220/21/2/413
depth maps compared
Apps that can do body tracking for your mobile devices
| ZIGSimPro an app that turns your phone/tablet into a depth sensor & tracking camera (over OSC) |
iKeleton OSC an app that turns your phone into body tracking camera (over OSC) sending X&Y coordinates |
Media Pipe* MediaPipe is a cross platform Framework for building machine learning pipelines for processing time-series data like video, audio, etc. Amongst many other possibilities it turns your webcam into a depth/tracking camera. |
| Mocap: optitrack TBD | Mocap: Vive 2x TBD Vive trackers Vive Ultimate trrackers |
|
Kinect on Mac
Kinect 360 & Kinect One works on Mac with Isadora
Allow a warmup time of 30-60 minutes for stable results.
Kinect + Processing > Mac (M1 Monterry & Ventura)
Kinect processing MAC M1, works on Monterry & Ventura
First install Rosetta:
https://osxdaily.com/2020/12/04/how-install-rosetta-2-apple-silicon-mac/
Get the libraries for processing:
https://github.com/shiffman/OpenKinect-for-Processing
https://shiffman.net/p5/kinect/ (dead link)
https://github.com/shiffman/OpenKinect-for-Processing/releases
Open standard library to test:
File > examples > contributed libraries. Open kinect for processing > V1 , then Run code
Do you get the error: NoClassDefFoundError: /com/sun/jna/Library ?
Fix: https://discourse.processing.org/t/processing-4-openkinect/32781/9
Example codes
Warning: the code for kinect 1 and 2 is not the same..
check: https://shiffman.net/p5/kinect/ (dead link)
> Examples
Tutorials for using Kinect data in Processing:
Check out the Coding Train videos series: Introduction to Computer vision, chapter 12.1 (What is the Kinect?): https://www.youtube.com/watch?v=QmVNgdapJJM
Link to the entire series: https://www.youtube.com/watch?v=h8tk0hmWB44&list=PLRqwX-V7Uu6aG2RJHErXKSWFDXU4qo_ro
Kinect in Isadora (Mac)
To use Kinect in Isadora you need to download a couple of plugins from the Troikatronix page;
https://troikatronix.com/add-ons/openni-tracker/
Read the instruction with attention & follow them.
Kinect 360 works on Mac air & Mac pro (M1 with Rosetta)
Kinect V1 works on Mac pro (M1 with Rosetta)
Connect your Kinect before starting Isadora.
Add the nodes in the picture below (or open the patch shared in nextcloud)
If your Kinect is not recognised by the software, try resetting or deleting the OpenNItracker or even adding it again.
Detailed explanation of the possibilities with Kinect in Isadora can be found here:
https://troikatronix.com/add-ons/tutorial-openni-tracker/
and here:
Setup & Lighting
How yous setup your Kinect matters a lot for your performance.
Think about placement, light & what you are wearing.
Read up on those specs here: Setup & lighting tips for kinect
Kinect on PC
Kinect works on PC in various types of software.
Install drivers first! Make sure to select the right driver & only install one driver at a time to avoid problems. Allow a warmup time of 30-60 minutes for stable results.
Drivers
Check our this dudes tutorial:
- Select the right type of driver for your kinect.
- Download & install as instructed on the pages below
- tip: only install one type of kinect a time on your pc, as things may get messy after mixing.
Kinect 360 (SDK 1.8)
- Install the Kinect Runtime 1.8 and Kinect for Windows SDK 1.8 from Microsoft.

This sensor is widely available on 'marktplaats ' & doesn't cost much. Don't forget to also purchase a dedicated Kinect power/USB cable to connect it to your computer!
Kinect One (SDK 2.0)
- Install the Kinect SDK 2.0 from Microsoft.
and Runtime 2.0

Kinect Azure
You can find installation details for Azure Kinect Sensor SDK and Firmware here.

TIPS FOR WORKING WITH ALL KINECT SENSORS
- Always connect the AC power supply that comes with the Kinect sensor. The green LED will light up under USB power, however the sensor will not function correctly unless the AC power supply is also connected.
- Kinect V1 can be less stable on USB3.0 ports, try USB2.0 ports if you are experiencing problems connecting tot the device or the connection drops out after some time.
- If using multiple Kinects, each Kinect sensor must be connected to its own USB controller. On some computers multiple USB ports will be on the same USB controller, this will cause problems if two Kinects are sharing that same controller. Refer to your computer's Device Manager to inspect which ports belong to each USB controller.
- Open your Touchdesigner patch first, then add the Kinect to your USB port. Select the right version.
- remember: you need the correct driver for the kinect you are using. Unistall the drivers you are NOT using, when switching Kinect type. How to Uninstall here
Kinect In Touchdesigner
Using any Kinect in Touchdesigner op PC is plug & play after you've installed the right drivers & SDK.
Open your Touchdesigner patch first, then add the Kinect to your USB port. Select the right version.
Ways to interface with Kinect in TouchDesigner
- Depth camera - Kinect TOP
- RGB camera - Kinect TOP
- Infrared camera - Kinect TOP
- Skeleton Point Tracking - Kinect CHOP
- Hand Interaction - Kinect CHOP
- Microphone Array Audio Capture - Audio Device In CHOP
- To control the tilt of the camera, use the Tscript
kinecttiltCommand
The Kinect Azure has the above but use specific operators hat work together:
- Kinect Azure TOP
- Kinect Azure Select TOP
- Skeleton Point Tracking - Kinect Azure CHOP NOTE: For joint orientation and bone hierarchy, see: Kinect Hierarchy
The Pallete has this interesting component: Kinect Callibration for Projection Mapping which allows for calculating the intrinsics and extrinsics of a projector in relation to a Kinect device making it possible to project onto the scene captured by the kinect.
Check out the specifics, possibilities and some example patches on the derivative site:
https://derivative.ca/UserGuide/Kinect1 for Kinect 360
https://derivative.ca/UserGuide/Kinect for Kinect One
or Kinect Azure in the search bar
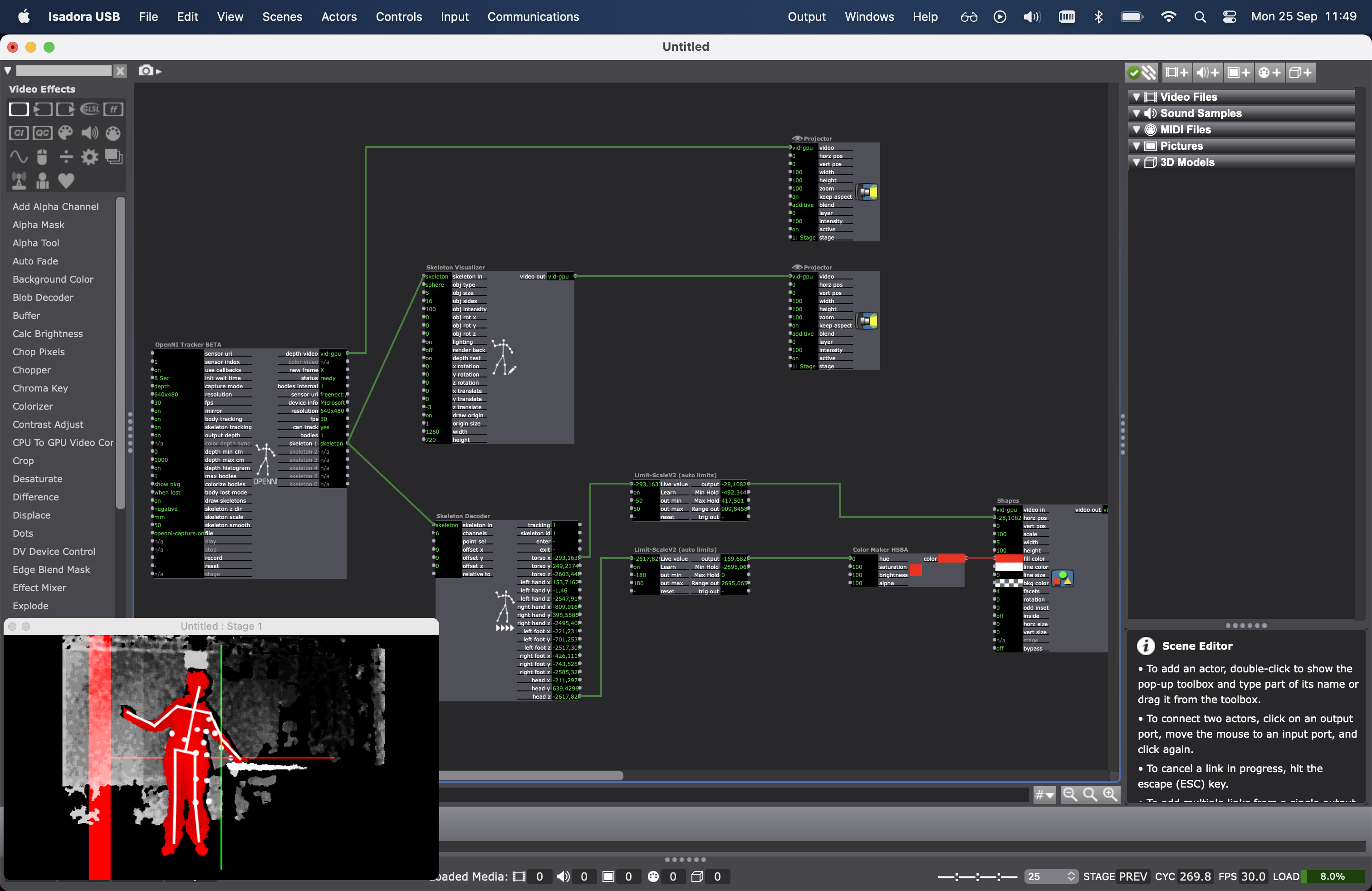
Kinect in Isadora
To use Kinect in Isadora you need to download a couple of plugins from the Troikatronix page;
https://troikatronix.com/add-ons/openni-tracker/
Read the instruction with attention & follow them.
Connect your Kinect before starting Isadora.
Add the nodes in the picture below (or open the patch shared in nextcloud)
If your Kinect is not recognised by the software, try resetting or deleting the OpenNItracker or even adding it again.
Detailed explanation of the possibilities with Kinect in Isadora can be found here:
https://troikatronix.com/add-ons/tutorial-openni-tracker/
and here:
Issues:
- If you followed all the steps and read the info for your operating system and the Kinect still doesnt work it might be that the issues can be (on PC) that the plugins are installed in the wrong place.
Go to Isadora > help > open plugin folder > TroikaTronix actor Plugins
you should see the plugins here: OpenNI tracker, Skeleton Decoder, Skeleton Visualiser.
If you dont see them check the folder : Plugins. If the are installed in this folder copy them to the directory above (TroikaTronix actor Plugins)
You might need to restart Isadora.
Setup & Lighting
How yous setup your Kinect matters a lot for your performance.
Think about placement, light & what you are wearing.
Read up on those specs here: Setup & lighting tips for kinect
Mediapipe
MediaPipe is a cross platform Framework for building machine learning pipelines for processing time-series data like video, audio, etc. Amongst many other possibilities it turns your webcam into a depth/tracking camera.
Full documentation can be found here https://developers.google.com/mediapipe/
There are various ways to get Mediapipe set up in your computer;
When using Touchdesigner, have a look HERE
But also, be sure to check out Gazebo, a HKU built OSC tool, that also runs Mediapipe.
Oak D
Unleash Your Creativity with Oak-D and TouchDesigner
see bottom of the page for tutorials & setup.
- Introduction
- Overview of the Oak-D AI Powered Camera
- Understanding Depth AI and its Applications 3.1 Media Pipe Hand Tracking 3.2 YOLO Object Recognition Model 3.3 Gaze Estimation 3.4 Segmentation 3.5 Text Detection
- Comparing Oak-D with Other Cameras in the Market 4.1 Azure Camera 4.2 Pros and Cons of Oak-D
- Setting Up the Necessary Libraries 5.1 Installing Python and Required Libraries 5.2 Using PyCharm as the Integrated Development Environment 5.3 Working with Virtual Environments
- Exploring the Depth AI Examples 6.1 Understanding the Color Camera and RGB Video Example 6.2 Exploring the Stereo Depth Example
- Conclusion
The Oak-D AI Powered Camera: A Game Changer in Computer Vision
Artificial Intelligence (AI) is revolutionizing various fields, and one area where it is making significant advancements is computer vision. In this article, we will delve into the world of the Oak-D AI powered camera. We will explore its features, applications, and advantages over other cameras in the market. Moreover, we will guide you through the process of setting up the necessary libraries and provide an overview of the depth AI examples.
1. Introduction
AI has become a game changer in various industries, and computer vision is one domain where its impact is transformative. The Oak-D AI powered camera is a remarkable innovation in the world of computer vision. Equipped with stereo and mono cameras, as well as an RGB camera, the Oak-D camera is capable of running various AI models. In this article, we will explore the capabilities of the Oak-D camera and guide you through the process of getting it up and running.
2. Overview of the Oak-D AI Powered Camera
The Oak-D camera, developed by Luxonis, is an AI powered camera that combines hardware and software to enable advanced computer vision applications. It consists of stereo and mono cameras on the sides, along with an RGB camera in the middle. This configuration allows the camera to capture depth and color information simultaneously. Additionally, the Oak-D camera can load and run various AI models, making it versatile and suitable for a wide range of applications.
3. Understanding Depth AI and its Applications
Depth AI is the Spatial AI platform that is embedded in the Oak-D camera. It is responsible for processing the captured data and running the AI models. The Oak-D camera supports numerous AI models that enable applications such as media pipe HAND tracking, YOLO object recognition, gaze estimation, segmentation, and text detection.
3.1 Media Pipe Hand Tracking
One of the key applications of the Oak-D camera is media pipe hand tracking. This AI model allows the camera to track and recognise hand movements in real time. It has extensive applications in fields such as robotics and engineering, and is gaining popularity in the art and tech communities.
3.2 YOLO Object Recognition Model
The Oak-D camera is also capable of running the YOLO (You Only Look Once) object recognition model. This model enables real-time object detection and recognition, providing accurate and fast results. It has applications in fields such as surveillance, autonomous vehicles, and augmented reality.
3.3 Gaze Estimation
Another powerful feature of the Oak-D camera is the ability to estimate gaze direction. This AI model can accurately determine where a person is looking, enabling applications such as eye tracking, Attention analysis, and user interaction in various domains.
3.4 Segmentation
The Oak-D camera can also perform image segmentation, which involves separating an image into different regions or objects. This enables precise object identification and tracking, with applications in areas such as medical imaging, scene understanding, and image editing.
3.5 Text Detection
Text detection is another AI model that the Oak-D camera can handle effectively. It can identify and extract text from images, enabling applications such as optical character recognition (OCR), document analysis, and text-to-speech conversion.
4. Comparing Oak-D with Other Cameras in the Market
When exploring AI powered cameras, it is essential to consider the available options. One popular camera in the market is the Azure Camera. However, the Oak-D camera offers several advantages over the Azure Camera.
4.1 Azure Camera
The Azure Camera is a well-known AI powered camera in the market. While it offers impressive features, it falls short in certain areas compared to the Oak-D camera. Firstly, the Oak-D camera is more affordable, making it an attractive option for various applications. Additionally, the Oak-D camera has the ability to load and run multiple AI models, providing greater flexibility compared to the limited options of the Azure Camera.
4.2 Pros and Cons of Oak-D
Pros:
- Affordability: The Oak-D camera offers a cost-effective solution for AI powered computer vision applications.
- Versatility: With the ability to load and run multiple AI models, the Oak-D camera caters to a wide range of applications.
- Depth Sensing: The stereo and mono cameras of the Oak-D camera enable accurate depth sensing in well-lit environments.
Cons:
- Limited Depth Sensing in Low-Light Environments: The depth sensing capabilities of the Oak-D camera are limited in poorly lit environments, unless the AI infrared (IR) illumination feature is used.
- Integration Challenges: While the Oak-D camera offers extensive capabilities, integrating it into existing systems might require technical expertise.
5. Setting Up the Necessary Libraries
Before diving into the world of the Oak-D camera, it is important to set up the necessary libraries and dependencies. This section will guide you through the process step by step.
5.1 Installing Python and Required Libraries
Python is the language used for this project and requires the latest version of Python 3 to be installed. The depth AI examples use the OpenCV library for computer vision tasks. To install OpenCV, simply run the command python3 -m pip install opencv-python.
5.2 Using PyCharm as the Integrated Development Environment
PyCharm is an integrated development environment that simplifies the process of writing and running Python code. It is recommended to use PyCharm for this project. Download and install PyCharm from the JetBrains Website.
5.3 Working with Virtual Environments
To ensure project isolation and avoid conflicts between different versions of libraries, it is best to work with virtual environments. PyCharm automatically creates a virtual environment for each project, allowing you to install project-specific libraries without affecting other projects. This practice ensures a smooth development experience.
6. Exploring the Depth AI Examples
The depth AI examples provided with the Oak-D camera are a great starting point for understanding its capabilities. This section will provide an overview of two examples: the Color Camera RGB Video and the Stereo Depth Video.
6.1 Understanding the Color Camera and RGB Video Example
The Color Camera and RGB Video example demonstrates how to capture RGB video using the Oak-D camera. It opens an OpenCV window showing the live video feed from the camera. This example allows users to gain Insight into the camera's color capabilities and serves as a baseline for further exploration.
6.2 Exploring the Stereo Depth Example
The Stereo Depth example showcases the Oak-D camera's depth sensing capabilities. It creates a 3D depth map by using the stereo and mono cameras. The example visualizes the depth map by rendering multiple views, providing a comprehensive understanding of the camera's depth Perception.
7. Conclusion
The Oak-D AI powered camera is a remarkable tool for computer vision applications. Its versatility, affordability, and support for various AI models make it a valuable asset in fields such as robotics, engineering, and art. By understanding the setup process and exploring the provided depth AI examples, you can unleash the full potential of this powerful camera and dive into the world of AI powered computer vision.
Highlights
- The Oak-D AI powered camera combines hardware and software to enable advanced computer vision applications.
- Depth AI, the spatial AI platform embedded in the Oak-D camera, allows for the execution of various AI models.
- The Oak-D camera supports applications such as media pipe hand tracking, YOLO object recognition, gaze estimation, segmentation, and text detection.
- When compared to the Azure Camera, the Oak-D camera offers affordability, versatility, and the ability to load multiple AI models.
- Setting up the necessary libraries, using PyCharm as the IDE, and working with virtual environments are essential steps in utilizing the Oak-D camera.
- Exploring the provided depth AI examples, such as the Color Camera RGB Video and Stereo Depth Video, allows users to grasp the capabilities of the Oak-D camera.
FAQ
Q: Can the Oak-D AI powered camera be integrated into existing systems easily?
A: While the Oak-D camera offers extensive capabilities, integrating it into existing systems might require technical expertise due to its advanced features and dependencies.
Q: How does the depth sensing of the Oak-D camera work in poorly lit environments?
A: The stereo and mono cameras of the Oak-D camera rely on well-lit environments for accurate depth sensing. However, the Oak-D Pro version, equipped with AI infrared (IR) illumination, can provide depth sensing in poorly lit environments.
Q: Are there alternative cameras to the Oak-D for AI powered computer vision applications?
A: Yes, the Azure Camera is a popular alternative. However, the Oak-D camera offers advantages such as affordability, versatility, and the ability to load multiple AI models.
Q: What software is required to run the Oak-D camera?
A: The Oak-D camera requires the installation of Python, OpenCV, and the depth AI library. The PyCharm IDE is recommended for managing the project and running the examples.
At HKU we have an OakD Lite in the Blackbox. This works best in well lit envoirnments (no IR)
Zed 2i
ZED 2i is an IP66-rated Rolling Shutter camera built for spatial analytics and immersive experiences, powered by Neural Depth Engine 2. Ready to deploy, it has a robust aluminum enclosure, high-performance IMU and USB 3.1 connection.
ALL the info on ZED camera's
Works on PC only
How to install: https://www.stereolabs.com/docs/installation/windows
Main Features
- Dual-Lens Stereo Vision: Provides advanced depth perception and 3D mapping capabilities.
- Spatial Understanding: Offers a detailed understanding of the surrounding environment.
- Motion Tracking: Tracks objects and people in real-time with high accuracy.
- High-Resolution Imaging: Captures high-quality images, essential for detailed visual work.
- Robust Build: Designed for a variety of environments, enhancing versatility.
- Integrated Sensors: Includes IMU, barometer, and magnetometer for comprehensive data collection.
- Flexible Connectivity: USB 3.1 connection for easy integration with various systems.
Here are the links to the TouchDesigner documentation regarding ZED TOP, CHOP and SOP:
TOP: https://docs.derivative.ca/ZED_TOP
CHOP: https://docs.derivative.ca/ZED_CHOP
SOP: https://docs.derivative.ca/ZED_SOP
Also, if this is a topic of your interest, it might come in handy to have a look at the official ZED documentation:
https://www.stereolabs.com/docs
more info on https://interactiveimmersive.io/blog/touchdesigner-integrations/updated-zed-camera-features-in-touchdesigner/
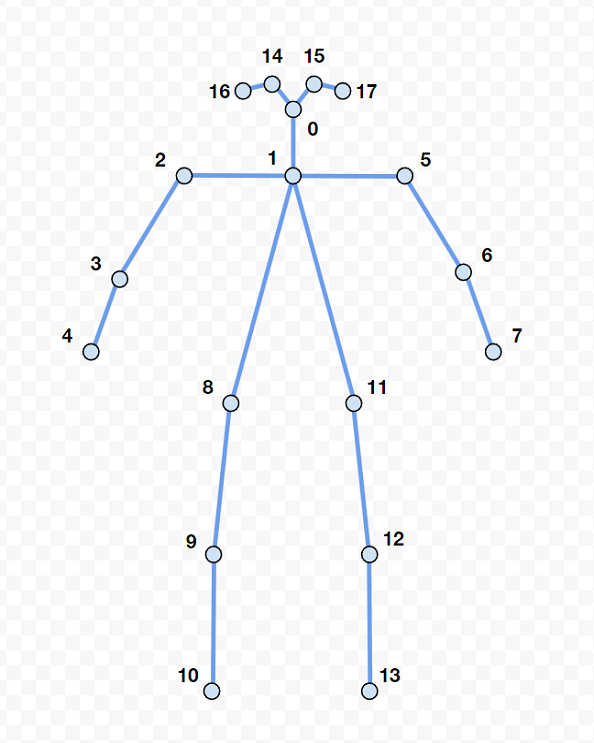
Skeleton tracking keypoints (there are various options)
Various Plugins & tutorials
Touchdesigner:
Orbec Astra : not natively supported because of being discontinued, this Touchdesigner plugin by Nuitech does the work for pc. Needs to be pulsed every 10 minutes (or buy Nuitech software).
OakD : OakD runs software called Depth Ai, info found here, check it out to see more info on the specs
Support in TD is native.
https://www.toolify.ai/ai-news/unleash-your-creativity-with-oakd-and-touchdesigner-208402
Check out these tutorials to get started:
Hokuyu URG-04LX-UG01
Dit is even een lelijke ruwe dump van mijn eerste experimenten wordt nog opgeschoond
Machiel
Test getting data from Python(linux)
git clone https://github.com/pasuder/hokuyo-python-lib.git
cd hokuyo-python-lib
pip install -r requirements
cd src/hokuyo/tests/
PYTHONPATH="../../" python3 test_driver_laser.py
Output:
BM
00P
---
{119.885: 762, 119.5329148311307: 754, 119.18082966226139: 742, 118.82874449339208: 742, 118.47665932452277: 742, 118.12457415565346: 785, 117.77248898678414: 785, 117.42040381791483: 790, 117.06831864904552: 790, 116.71623348017621: 1166, 116.3641483113069: 1166, 116.0120631424376: 1166, 115.65997797356829: 1019, 115.30789280469898: 1019, 114.95580763582967: 1019, 114.60372246696036: 1544, 114.25163729809105: 1548, 113.89955212922173: 1550, 113.54746696035242: 1558, 113.19538179148311: 1563, 112.8432966226138: 1563, 112.4912114537445: 1567, 112.13912628487519: 1567, 111.78704111600588: 1567, 111.43495594713657: 1568, 111.08287077826726: 1568, 110.73078560939794: 1583, 110.37870044052863: 1591, 110.02661527165932: 1596, 109.67453010279002: 1596, 109.3224449339207: 4318, 108.9703597650514: 8, 108.61827459618209: 4318, 108.26618942731278: 1141, 107.91410425844347: 1093, 107.56201908957416: 920, 107.20993392070486: 919, 106.85784875183555: 906, 106.50576358296624: 919, 106.15367841409692: 920, 105.80159324522761: 924, 105.4495080763583: 924, 105.09742290748899: 924, 104.74533773861968: 887, 104.39325256975037: 865, 104.04116740088106: 841, 103.68908223201176: 688, 103.33699706314243: 456, 102.98491189427313: 204, 102.63282672540382: 159, 102.28074155653451: 154, 101.9286563876652: 148, 101.57657121879589: 138, 101.22448604992658: 132, 100.87240088105727: 131, 100.52031571218797: 127, 100.16823054331866: 127, 99.81614537444935: 125, 99.46406020558004: 119, 99.11197503671073: 117, 98.75988986784142: 113, 98.4078046989721: 108, 98.05571953010279: 107, 97.70363436123348: 105, 97.35154919236417: 101, 96.99946402349487: 98, 96.64737885462556: 91, 96.29529368575625: 84, 95.94320851688693: 81, 95.59112334801762: 80, 95.23903817914831: 79, 94.886953010279: 76, 94.53486784140969: 76, 94.18278267254038: 73, 93.83069750367108: 73, 93.47861233480177: 72, 93.12652716593246: 71, 92.77444199706315: 68, 92.42235682819384: 68, 92.07027165932453: 67, 91.71818649045522: 65, 91.36610132158592: 65, 91.0140161527166: 68, 90.66193098384728: 65, 90.30984581497798: 66, 89.95776064610867: 68, 89.60567547723936: 66, 89.25359030837005: 66, 88.90150513950074: 66, 88.54941997063143: 65, 88.19733480176211: 65, 87.8452496328928: 65, 87.4931644640235: 65, 87.14107929515419: 70, 86.78899412628488: 70, 86.43690895741557: 67, 86.08482378854626: 70, 85.73273861967695: 67, 85.38065345080764: 67, 85.02856828193833: 66, 84.67648311306903: 64, 84.32439794419972: 51, 83.97231277533041: 49, 83.6202276064611: 49, 83.26814243759178: 49, 82.91605726872247: 50, 82.56397209985316: 52, 82.21188693098385: 52, 81.85980176211454: 50, 81.50771659324523: 49, 81.15563142437591: 49, 80.8035462555066: 48, 80.4514610866373: 48, 80.09937591776799: 49, 79.74729074889868: 49, 79.39520558002937: 49, 79.04312041116006: 49, 78.69103524229075: 50, 78.33895007342144: 50, 77.98686490455214: 50, 77.63477973568283: 50, 77.28269456681352: 50, 76.93060939794421: 52, 76.5785242290749: 52, 76.22643906020559: 55, 75.87435389133628: 56, 75.52226872246696: 60, 75.17018355359765: 60, 74.81809838472834: 60, 74.46601321585904: 60, 74.11392804698973: 64, 73.7618428781204: 64, 73.4097577092511: 65, 73.05767254038179: 70, 72.70558737151248: 72, 72.35350220264317: 77, 72.00141703377386: 78, 71.64933186490455: 80, 71.29724669603524: 82, 70.94516152716594: 85, 70.59307635829663: 88, 70.24099118942732: 89, 69.88890602055801: 92, 69.5368208516887: 94, 69.1847356828194: 100, 68.83265051395009: 105, 68.48056534508078: 108, 68.12848017621145: 109, 67.77639500734215: 110, 67.42430983847284: 113, 67.07222466960353: 113, 66.72013950073422: 109, 66.36805433186491: 100, 66.01596916299559: 91, 65.66388399412628: 91, 65.31179882525697: 88, 64.95971365638766: 88, 64.60762848751835: 88, 64.25554331864905: 96, 63.90345814977974: 97, 63.55137298091043: 102, 63.19928781204112: 105, 62.84720264317181: 105, 62.495117474302496: 105, 62.14303230543319: 109, 61.79094713656388: 110, 61.43886196769457: 110, 61.08677679882526: 110, 60.73469162995595: 110, 60.38260646108664: 110, 60.03052129221733: 110, 59.67843612334802: 112, 59.32635095447871: 114, 58.974265785609404: 118, 58.62218061674009: 121, 58.27009544787078: 121, 57.91801027900147: 121, 57.56592511013216: 121, 57.213839941262854: 127, 56.86175477239354: 129, 56.50966960352423: 129, 56.15758443465492: 144, 55.80549926578561: 145, 55.453414096916305: 145, 55.101328928046996: 144, 54.74924375917769: 144, 54.39715859030838: 145, 54.04507342143906: 144, 53.69298825256975: 149, 53.34090308370044: 149, 52.98881791483113: 145, 52.63673274596182: 145, 52.284647577092514: 149, 51.932562408223205: 146, 51.5804772393539: 153, 51.22839207048459: 155, 50.87630690161528: 155, 50.52422173274597: 156, 50.17213656387665: 156, 49.82005139500734: 159, 49.46796622613803: 171, 49.11588105726872: 176, 48.763795888399414: 180, 48.411710719530106: 183, 48.0596255506608: 183, 47.70754038179149: 183, 47.35545521292218: 185, 47.00337004405287: 191, 46.65128487518355: 218, 46.29919970631424: 223, 45.94711453744493: 223, 45.595029368575624: 226, 45.242944199706315: 226, 44.89085903083701: 226, 44.5387738619677: 228, 44.18668869309839: 230, 43.83460352422908: 234, 43.48251835535977: 235, 43.130433186490464: 239, 42.77834801762114: 241, 42.42626284875183: 249, 42.074177679882524: 266, 41.722092511013216: 273, 41.37000734214391: 273, 41.0179221732746: 273, 40.66583700440529: 273, 40.31375183553598: 273, 39.96166666666667: 265, 39.609581497797365: 256, 39.257496328928056: 251, 38.90541116005873: 247, 38.553325991189425: 247, 38.201240822320116: 247, 37.84915565345081: 241, 37.4970704845815: 240, 37.14498531571219: 240, 36.79290014684288: 240, 36.440814977973574: 241, 36.088729809104265: 250, 35.73664464023496: 251, 35.38455947136565: 251, 35.032474302496325: 251, 34.68038913362702: 250, 34.32830396475771: 246, 33.9762187958884: 246, 33.62413362701909: 249, 33.27204845814978: 249, 32.919963289280474: 249, 32.567878120411166: 250, 32.21579295154186: 250, 31.86370778267255: 253, 31.511622613803226: 253, 31.159537444933918: 255, 30.80745227606461: 259, 30.4553671071953: 260, 30.103281938325992: 270, 29.751196769456683: 273, 29.399111600587375: 0, 29.047026431718066: 0, 28.694941262848758: 0, 28.34285609397945: 0, 27.99077092511014: 0, 27.638685756240818: 0, 27.28660058737151: 0, 26.9345154185022: 0, 26.582430249632893: 0, 26.230345080763584: 0, 25.878259911894276: 0, 25.526174743024967: 0, 25.17408957415566: 6, 24.82200440528635: 6, 24.46991923641704: 6, 24.11783406754772: 6, 23.76574889867841: 6, 23.4136637298091: 0, 23.061578560939793: 0, 22.709493392070485: 6, 22.357408223201176: 6, 22.005323054331868: 6, 21.65323788546256: 6, 21.30115271659325: 6, 20.949067547723942: 6, 20.596982378854634: 6, 20.24489720998531: 6, 19.892812041116002: 6, 19.540726872246694: 6, 19.188641703377385: 6, 18.836556534508077: 6, 18.48447136563877: 6, 18.13238619676946: 6, 17.78030102790015: 6, 17.428215859030843: 6, 17.076130690161534: 6, 16.724045521292226: 6, 16.371960352422903: 6, 16.019875183553594: 6, 15.667790014684286: 6, 15.315704845814977: 6, 14.963619676945669: 6, 14.61153450807636: 6, 14.259449339207052: 6, 13.907364170337743: 6, 13.555279001468435: 6, 13.203193832599126: 0, 12.851108663729818: 0, 12.499023494860495: 0, 12.146938325991187: 0, 11.794853157121878: 990, 11.44276798825257: 990, 11.090682819383261: 990, 10.738597650513952: 1008, 10.386512481644644: 1013, 10.034427312775335: 1037, 9.682342143906027: 1037, 9.330256975036718: 1037, 8.978171806167396: 595, 8.626086637298087: 589, 8.274001468428779: 589, 7.92191629955947: 582, 7.569831130690162: 574, 7.217745961820853: 558, 6.8656607929515445: 558, 6.513575624082236: 558, 6.1614904552129275: 573, 5.809405286343619: 578, 5.4573201174743105: 578, 5.105234948604988: 573, 4.753149779735679: 573, 4.401064610866371: 572, 4.048979441997062: 570, 3.6968942731277536: 569, 3.344809104258445: 570, 2.9927239353891366: 570, 2.640638766519828: 571, 2.2885535976505196: 571, 1.936468428781211: 571, 1.5843832599118883: 571, 1.2322980910425798: 568, 0.8802129221732713: 563, 0.5281277533039628: 568, 0.17604258443465426: 581, -0.17604258443465426: 581, -0.5281277533039628: 581, -0.8802129221732713: 581, -1.2322980910425798: 608, -1.5843832599118883: 633, -1.9364684287811968: 0, -2.2885535976505196: 0, -2.640638766519828: 0, -2.9927239353891366: 0, -3.344809104258445: 0, -3.6968942731277536: 0, -4.048979441997062: 0, -4.401064610866371: 0, -4.753149779735679: 0, -5.105234948604988: 0, -5.457320117474296: 0, -5.809405286343605: 0, -6.1614904552129275: 0, -6.513575624082236: 0, -6.8656607929515445: 0, -7.217745961820853: 0, -7.569831130690162: 0, -7.92191629955947: 0, -8.274001468428779: 0, -8.626086637298087: 0, -8.978171806167396: 0, -9.330256975036704: 0, -9.682342143906013: 0, -10.034427312775321: 0, -10.38651248164463: 0, -10.738597650513938: 0, -11.090682819383247: 0, -11.442767988252555: 0, -11.794853157121892: 0, -12.1469383259912: 0, -12.49902349486051: 0, -12.851108663729818: 0, -13.203193832599126: 0, -13.555279001468435: 0, -13.907364170337743: 0, -14.259449339207052: 0, -14.61153450807636: 0, -14.963619676945669: 0, -15.315704845814977: 0, -15.667790014684286: 0, -16.019875183553594: 0, -16.371960352422903: 0, -16.72404552129221: 0, -17.07613069016152: 0, -17.42821585903083: 0, -17.780301027900137: 0, -18.132386196769446: 0, -18.484471365638754: 0, -18.836556534508063: 0, -19.1886417033774: 6, -19.540726872246708: 6, -19.892812041116017: 0, -20.244897209985325: 0, -20.596982378854634: 0, -20.949067547723942: 0, -21.30115271659325: 0, -21.65323788546256: 716, -22.005323054331868: 683, -22.357408223201176: 669, -22.709493392070485: 650, -23.061578560939793: 650, -23.4136637298091: 646, -23.76574889867841: 646, -24.11783406754772: 659, -24.469919236417027: 667, -24.822004405286336: 659, -25.174089574155644: 675, -25.526174743024953: 675, -25.87825991189426: 670, -26.23034508076357: 652, -26.582430249632907: 652, -26.934515418502215: 652, -27.286600587371524: 642, -27.638685756240832: 642, -27.99077092511014: 642, -28.34285609397945: 642, -28.694941262848758: 627, -29.047026431718066: 627, -29.399111600587375: 627, -29.751196769456683: 627, -30.103281938325992: 631, -30.4553671071953: 631, -30.80745227606461: 628, -31.159537444933918: 626, -31.511622613803226: 626, -31.863707782672535: 626, -32.21579295154184: 612, -32.56787812041115: 612, -32.91996328928046: 623, -33.27204845814977: 626, -33.62413362701908: 626, -33.976218795888386: 626, -34.32830396475772: 671, -34.68038913362703: 681, -35.03247430249634: 720, -35.38455947136565: 785, -35.73664464023496: 789, -36.088729809104265: 791, -36.440814977973574: 791, -36.79290014684288: 791, -37.14498531571219: 785, -37.4970704845815: 785, -37.84915565345081: 785, -38.201240822320116: 792, -38.553325991189425: 810, -38.90541116005873: 810, -39.25749632892804: 792, -39.60958149779735: 780, -39.96166666666666: 780, -40.31375183553597: 780, -40.665837004405276: 792, -41.017922173274584: 801, -41.37000734214389: 865, -41.72209251101323: 818, -42.07417767988254: 873, -42.42626284875185: 873, -42.778348017621155: 873, -43.130433186490464: 7, -43.48251835535977: 945, -43.83460352422908: 945, -44.18668869309839: 945, -44.5387738619677: 945, -44.89085903083701: 7, -45.242944199706315: 0, -45.595029368575624: 7, -45.94711453744493: 892, -46.29919970631424: 892, -46.65128487518355: 892, -47.00337004405286: 870, -47.355455212922166: 863, -47.707540381791475: 870, -48.05962555066078: 870, -48.41171071953009: 911, -48.7637958883994: 3930, -49.11588105726871: 3930, -49.467966226138046: 976, -49.820051395007354: 911, -50.17213656387666: 916, -50.52422173274597: 915, -50.87630690161528: 915, -51.22839207048459: 915, -51.5804772393539: 916, -51.932562408223205: 915, -52.284647577092514: 919, -52.63673274596182: 928, -52.98881791483113: 3462, -53.34090308370044: 3379, -53.69298825256975: 3462, -54.04507342143906: 0, -54.397158590308365: 0, -54.74924375917767: 0, -55.10132892804698: 0, -55.45341409691629: 7, -55.8054992657856: 0, -56.15758443465491: 0, -56.509669603524216: 7, -56.86175477239355: 3074, -57.21383994126286: 3074, -57.56592511013217: 0, -57.91801027900148: 3074, -58.27009544787079: 3074, -58.622180616740096: 0, -58.974265785609404: 0, -59.32635095447871: 0, -59.67843612334802: 0, -60.03052129221733: 0, -60.38260646108664: 0, -60.73469162995595: 7, -61.086776798825255: 0, -61.438861967694564: 0, -61.79094713656387: 0, -62.14303230543318: 0, -62.49511747430249: 0, -62.8472026431718: 0, -63.199287812041106: 2917, -63.551372980910415: 187, -63.90345814977972: 2795, -64.25554331864906: 2795, -64.60762848751837: 2795, -64.95971365638768: 3013, -65.31179882525699: 3119, -65.6638839941263: 3119, -66.0159691629956: 3119, -66.36805433186491: 3119, -66.72013950073422: 0, -67.07222466960353: 0, -67.42430983847284: 0, -67.77639500734215: 0, -68.12848017621145: 0, -68.48056534508076: 0, -68.83265051395007: 0, -69.18473568281938: 0, -69.53682085168869: 0, -69.888906020558: 0, -70.2409911894273: 3320, -70.59307635829661: 3320, -70.94516152716592: 3263, -71.29724669603523: 476, -71.64933186490457: 476, -72.00141703377388: 476, -72.35350220264318: 476, -72.7055873715125: 476, -73.0576725403818: 468, -73.40975770925111: 468, -73.76184287812042: 468, -74.11392804698973: 468, -74.46601321585904: 492, -74.81809838472834: 499, -75.17018355359765: 549, -75.52226872246696: 963, -75.87435389133627: 963, -76.22643906020558: 963, -76.57852422907489: 928, -76.9306093979442: 928, -77.2826945668135: 881, -77.63477973568281: 870, -77.98686490455212: 881, -78.33895007342143: 868, -78.69103524229074: 868, -79.04312041116005: 3104, -79.39520558002938: 3104, -79.74729074889869: 3104, -80.099375917768: 3283, -80.45146108663731: 3322, -80.80354625550662: 3322, -81.15563142437593: 3322, -81.50771659324523: 3322, -81.85980176211454: 3322, -82.21188693098385: 3267, -82.56397209985316: 563, -82.91605726872247: 563, -83.26814243759178: 563, -83.62022760646109: 563, -83.9723127753304: 7, -84.3243979441997: 0, -84.67648311306901: 7, -85.02856828193832: 6, -85.38065345080763: 6, -85.73273861967694: 6, -86.08482378854625: 6, -86.43690895741555: 0, -86.78899412628489: 3549, -87.1410792951542: 3549, -87.49316446402351: 7, -87.84524963289282: 0, -88.19733480176212: 0, -88.54941997063143: 0, -88.90150513950074: 7, -89.25359030837005: 0, -89.60567547723936: 0, -89.95776064610867: 7, -90.30984581497798: 3903, -90.66193098384728: 859, -91.0140161527166: 881, -91.3661013215859: 881, -91.71818649045521: 881, -92.07027165932452: 936, -92.42235682819383: 941, -92.77444199706314: 941, -93.12652716593244: 936, -93.47861233480175: 929, -93.83069750367106: 929, -94.18278267254037: 909, -94.5348678414097: 889, -94.88695301027902: 909, -95.23903817914832: 933, -95.59112334801763: 933, -95.94320851688694: 0, -96.29529368575625: 0, -96.64737885462556: 0, -96.99946402349487: 0, -97.35154919236417: 0, -97.70363436123348: 0, -98.05571953010279: 7, -98.4078046989721: 0, -98.75988986784141: 0, -99.11197503671072: 6, -99.46406020558003: 7, -99.81614537444933: 0, -100.16823054331864: 7, -100.52031571218795: 4735, -100.87240088105726: 4577, -101.22448604992657: 4577, -101.57657121879588: 1946, -101.92865638766521: 1987, -102.28074155653452: 1987, -102.63282672540383: 1987, -102.98491189427314: 2073, -103.33699706314245: 2082, -103.68908223201176: 2085, -104.04116740088106: 2082, -104.39325256975037: 2083, -104.74533773861968: 2083, -105.09742290748899: 2100, -105.4495080763583: 2083, -105.80159324522761: 2110, -106.15367841409692: 2143, -106.50576358296622: 2143, -106.85784875183553: 2143, -107.20993392070484: 2143, -107.56201908957415: 2135, -107.91410425844346: 2129, -108.26618942731277: 2129, -108.61827459618208: 2129, -108.97035976505138: 2181, -109.32244493392072: 2221, -109.67453010279003: 2542, -110.02661527165934: 5277, -110.37870044052865: 5277, -110.73078560939796: 5277, -111.08287077826726: 5277, -111.43495594713657: 5277, -111.78704111600588: 6, -112.13912628487519: 7, -112.4912114537445: 4985, -112.8432966226138: 1585, -113.19538179148311: 1585, -113.54746696035242: 1585, -113.89955212922173: 1591, -114.25163729809104: 1591, -114.60372246696035: 1591, -114.95580763582966: 1558, -115.30789280469897: 1550, -115.65997797356827: 1550, -116.01206314243758: 1550, -116.36414831130689: 1558, -116.71623348017623: 1562, -117.06831864904554: 1562, -117.42040381791485: 1562, -117.77248898678415: 1562, -118.12457415565346: 1537, -118.47665932452277: 1528, -118.82874449339208: 1537, -119.18082966226139: 1528, -119.5329148311307: 1537, -119.885: 1543}
---
VV
00P
VEND:Hokuyo Automatic Co.,Ltd.;[
PROD:SOKUIKI Sensor URG-04LX-UG01(Simple-URG);[
FIRM:3.4.03(17/Dec./2012);T
PROT:SCIP 2.0;N
SERI:H1320257;I
---
PP
00P
MODL:URG-04LX-UG01(Simple-URG)(Hokuyo Automatic Co.,Ltd.);N
DMIN:20;4
DMAX:5600;_
ARES:1024;\
AMIN:44;7
AMAX:725;o
AFRT:384;6
SCAN:600;e
---
II
00P
MODL:URG-04LX-UG01(Simple-URG)(Hokuyo Automatic Co.,Ltd.);N
LASR:ON;9
SCSP:Initial(600[rpm])<-Default setting by user;A
MESM:Measuring by Normal Mode;0
SBPS:19200[bps]<-Default setting by user;A
TIME:06E03C;j
STAT:Sensor works well.;8
---
HS1
00P
---
HS0
00P
---
CR10
00P
---
CR99
00P
---
RS
00P
---
QT
00P
Touchdesigner
- https://docs.derivative.ca/index.php?title=Hokuyo_CHOP
- https://miwa-maroon.medium.com/super-introduction-hands-on-interactive-content-with-hokuyo-sensors-and-touchdesigner-46e24f051a2
- https://interactiveimmersive.io/blog/touchdesigner-resources/blob-tracking-tricks-in-touchdesigner/
- https://derivative.ca/UserGuide/Hokuyo_CHOP
- https://www.youtube.com/watch?v=opDVtyOQIeY
- https://github.com/STARRYWORKS-inc/HokuyoUtil
- https://www.youtube.com/watch?v=Xxw_gUPUcy8
- https://alltd.org/hokuyo-sensor-touchdesigner-tutorial/
- https://github.com/huskyroboticsteam/urg-lidar (driver)